14 Tree Graphs
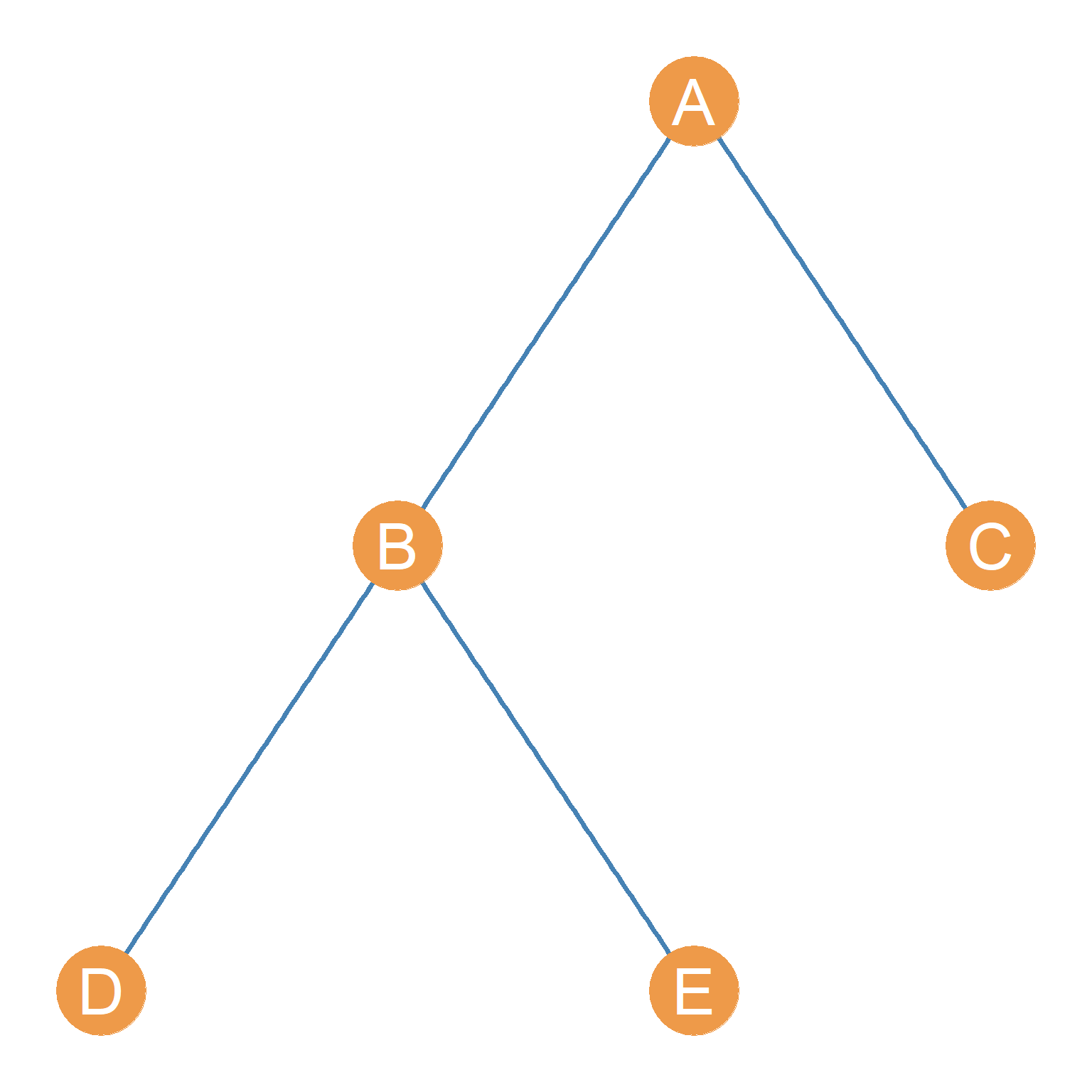
If a graph is both connected and has no cycles, then it is a tree graph (Benjamin, Chartrand, and Zhang 2017, 68). The three tree graphs with five nodes are shown in Figure 14.1. Recall from Section 11.5 in Chapter 11, that a cycle is a path (as defined in Section 11.1) that begins and ends with the same node. Thus, in a tree graph, you can never start with a node and trace a sequence of distinct edges and nodes that take you back to the node you started with!
14.1 Properties of Tree Graphs
Tree graphs have the interesting property that their number of edges \(m\) is always equal to their number of nodes \(n\) minus one. Thus, if a graph is a tree graph or order five, we know it must contain four edges (it must be of size four). For instance, in Figure 14.1, all the graphs have four links. If we were to add a fifth link connecting any pair of nodes in any of the graphs, it would create a cycle (of some length), and thus the graph would no longer be a tree! Try it for yourself and see.
In equation form, if \(G(n, m)\) is a tree graph, then:
\[ m = n - 1 \tag{14.1}\]
Using simple algebra, we can also solve for the order of a tree graph if we know the size:
\[ n = m + 1 \tag{14.2}\]
This equation states that the order of a tree graph equals the number of edges plus 1.
Note that, from Equation 10.4 in Section 10.5, the sum of the degrees of an undirected graph equals twice the number of edges (\(2m\)). Applying this reasoning, we can see that there is a special formula for the sum of degrees of an undirected tree graph. The reason is that if we know that:
\[ \sum_i k_i = 2m \tag{14.3}\]
And we also know that \(m = n - 1\) as per Equation 14.1, then substituting for \(m\) in Equation 14.4, gives us:
\[ \sum_i k_i = 2(n-1) = 2n - 2 \tag{14.4}\]
Thus, in a tree graph, the sum of degrees will always equal twice the number of nodes minus two!
Tree graphs have four other unique properties.
- First, if \(G\) is a tree graph, then every node \(V\) in \(G\) is linked to every other node via a single path.
- Second, the one path connecting each pair of nodes is unique, that is, a sequence of nodes and edges that is distinctive for that node pair and does not repeat for any other pair.
- Third, removing even a single edge of a tree graph disconnects the graph. Every edge of a tree graph thus counts as a bridge as discussed in Chapter 11.
- Fourth, following (3), if we disconnect a tree graph by removing an edge, the resulting connected components are also trees.
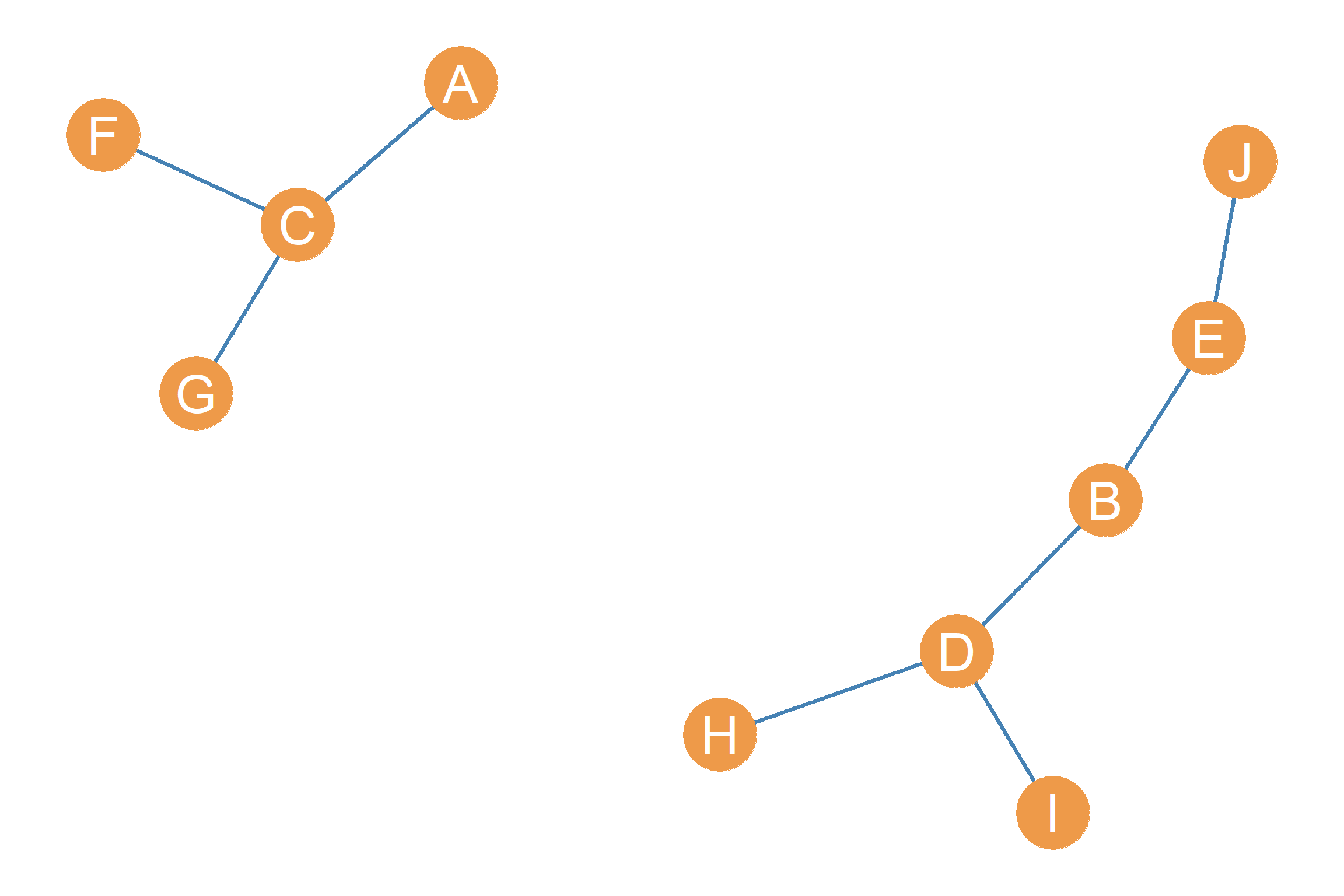
A disconnected graph whose components are trees is called (you guessed it) a forest. Figure 14.2 is a forest.
As Figure 14.1 shows, tree graphs come in different configurations, some of which are of particular note.
14.2 The Line Graph
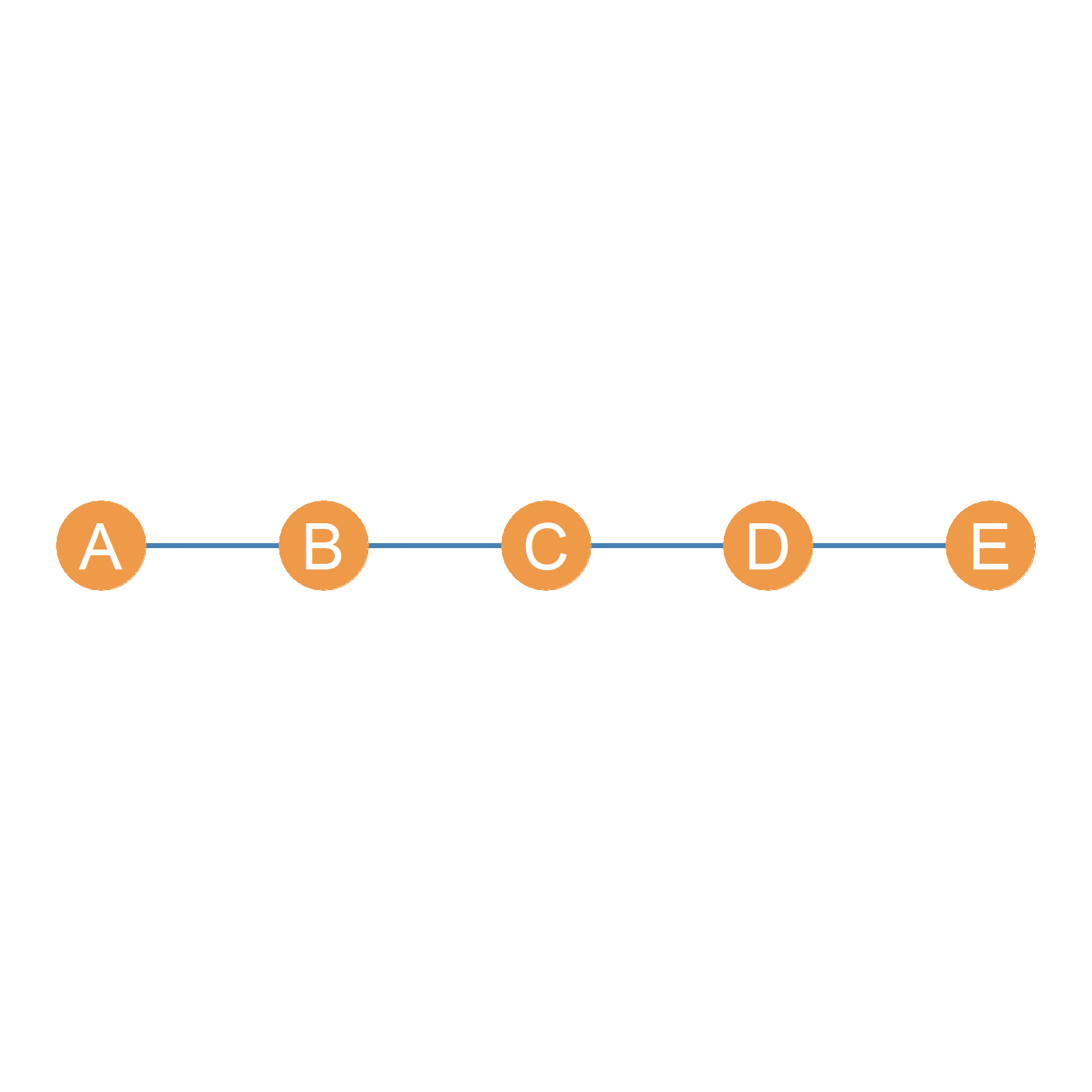
Note, for instance, that Figure 14.1(a) is just a straight path between two nodes. This graph is a tree because it is connected and has no cycles. A graph like Figure 14.1(a), which is just a single long path with some set of nodes, is also called the line graph. Line graphs are distinguished by their order and can be referred to as \(L_n\), where \(n\) is the number of nodes. Thus, \(L_5\) is the line graph shown in Figure 14.1(a); a line graph with five nodes.
What are line graphs useful for? Well, they can be used to model the social phenomenon known as the “telephone game.” We can set up people in a line graph in a laboratory, have nodes pass a message, a piece of gossip, or a story along the line, and see how different the original message relayed by \(A\) is by the time it gets to \(E\). Obviously, the longer the number of edges in the line, the more distortion we should expect at the other end.
14.3 The Star Graph
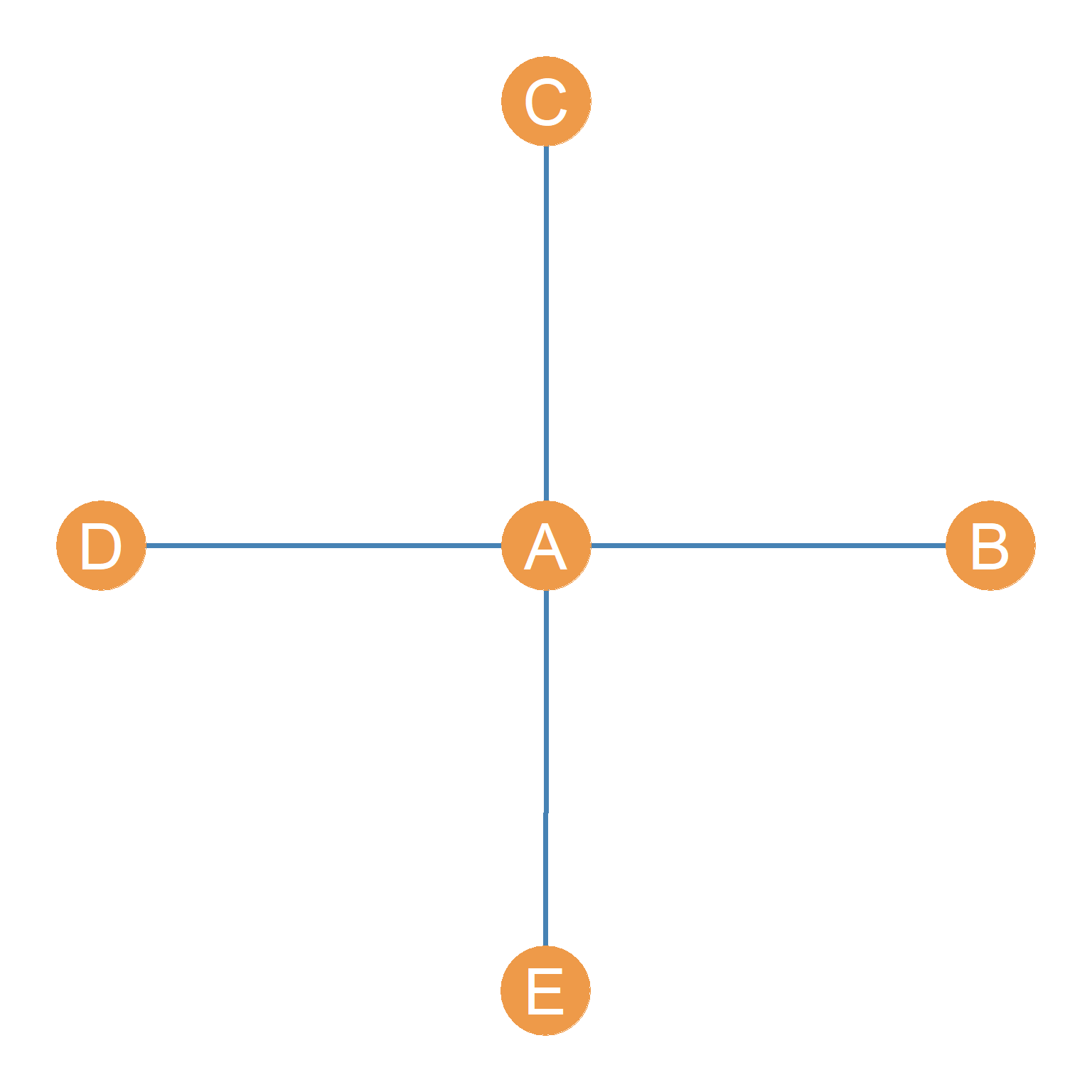
Note also the graph that is just a central node connected to all the other end-point nodes, which are not themselves connected to one another; for example, Figure 14.1(d) also counts as a tree. This graph is sometimes called the star graph. As with line graphs, we can refer to star graphs by a letter and a number indicating their order, such as \(S_n\). Thus, \(S_5\) is the star graph with five nodes as in Figure 14.1(d).
Star graphs are useful for modeling centralized systems, such as the airport network we saw in Chapter 1. Such hub-spoke systems feature a central node (the hub) connected to a bunch of end-point nodes not connected to one another (the spokes), as when a big airport (like LAX) sends flights to smaller regional airports. In this system, LAX is the “hub” at the center of the star, and the smaller airports are the “spokes” at the end.
14.4 Caterpillar Graphs
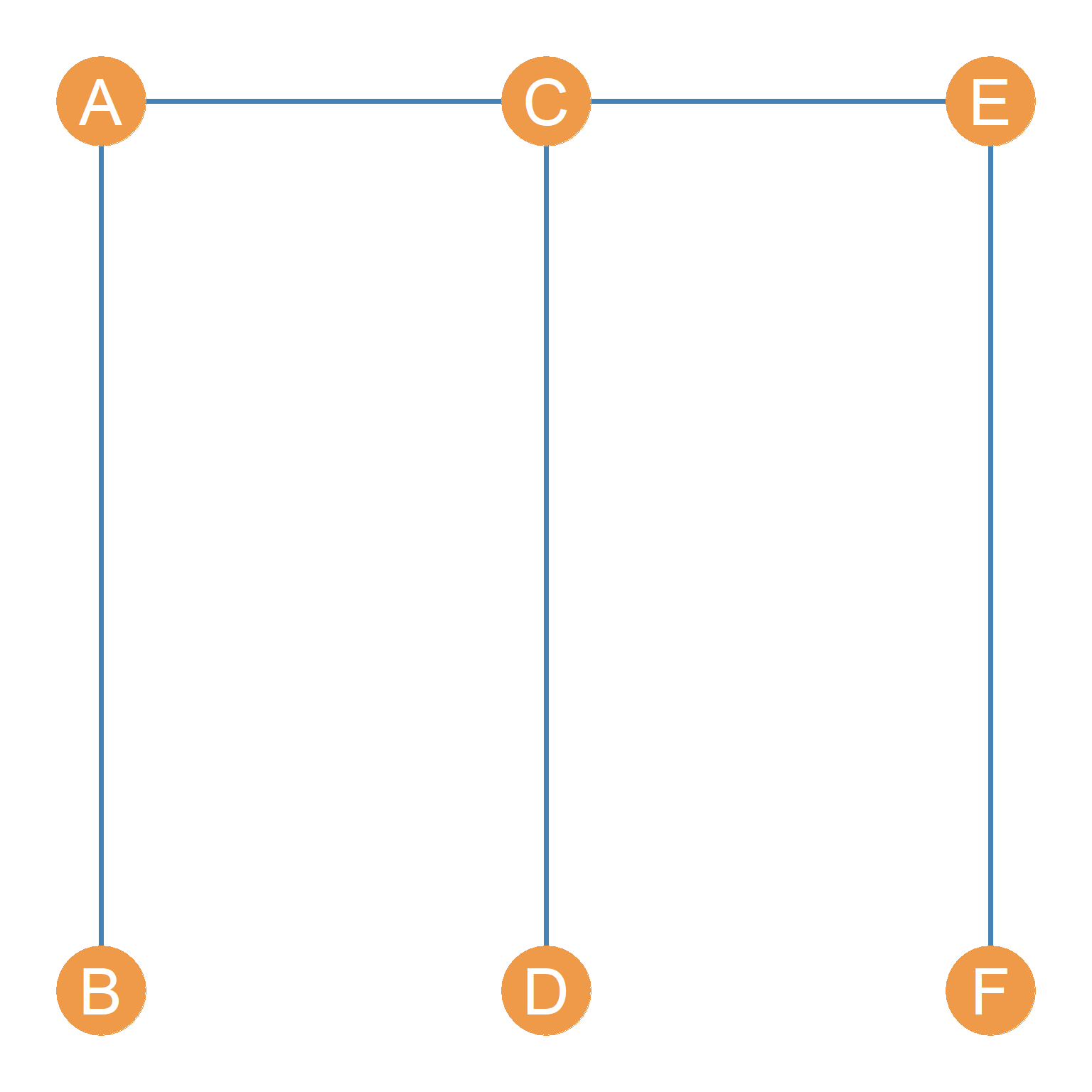
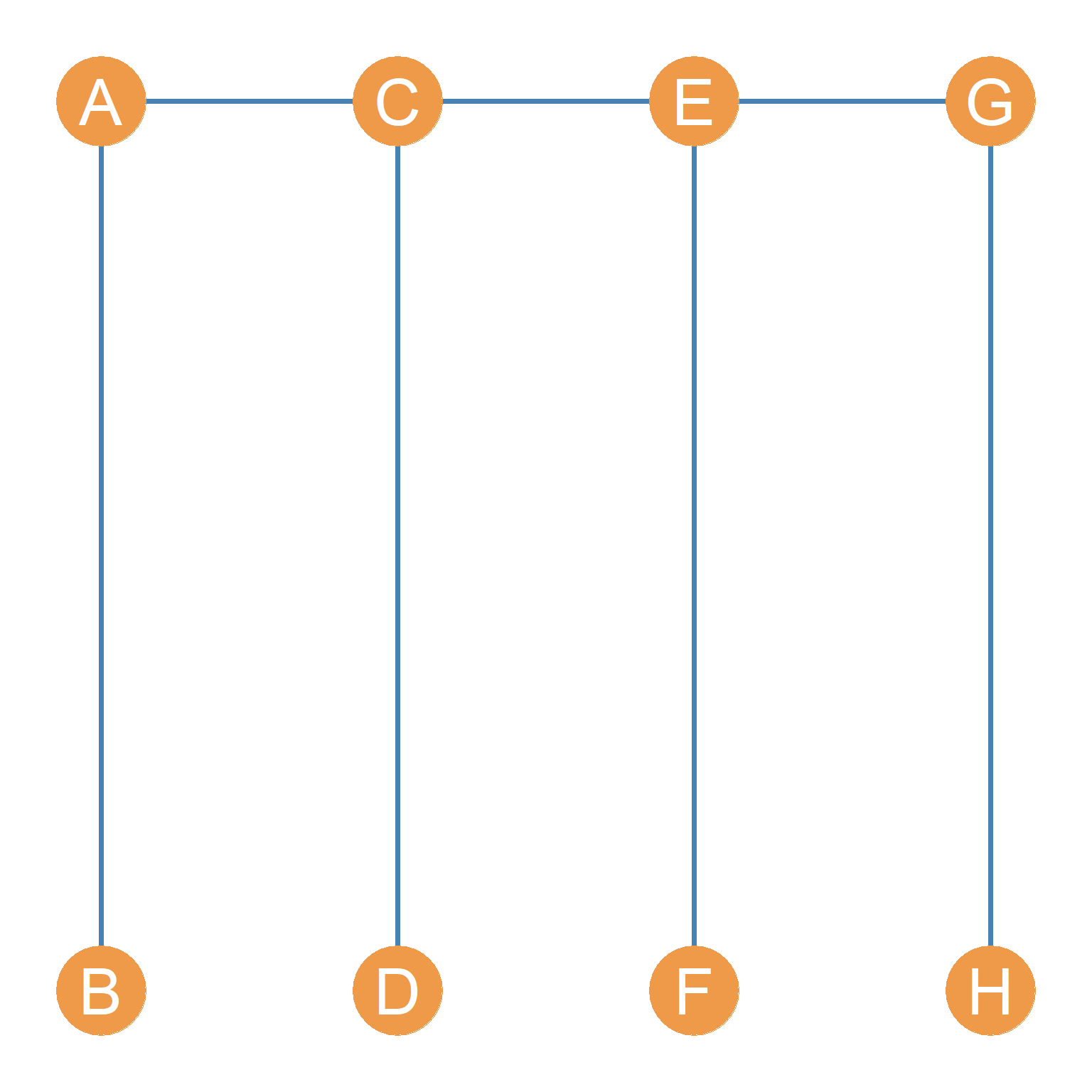
Tree graphs with an even number of nodes can sometimes be drawn like the ones in Figure 14.3. This is a line graph on top, with edges sticking out of each node, connecting to an equal number (half the other nodes in the graph) of endpoint nodes.
Because of the shape they form, these tree graphs are sometimes called caterpillar graphs, with the line graph at the top playing the role of the caterpillar’s “body” and the edges incident to the end point nodes playing the role of the “legs.” Figure 14.3(a) shows a caterpillar graph of order six, and Figure 14.3(b) shows a caterpillar graph of order eight.
Like other graphs, tree graphs can be directed and undirected. The graphs shown in Figure 14.1 and Figure 14.3 are undirected trees.
References
Benjamin, Arthur, Gary Chartrand, and Ping Zhang. 2017. The Fascinating World of Graph Theory. Princeton University Press.